Abstract
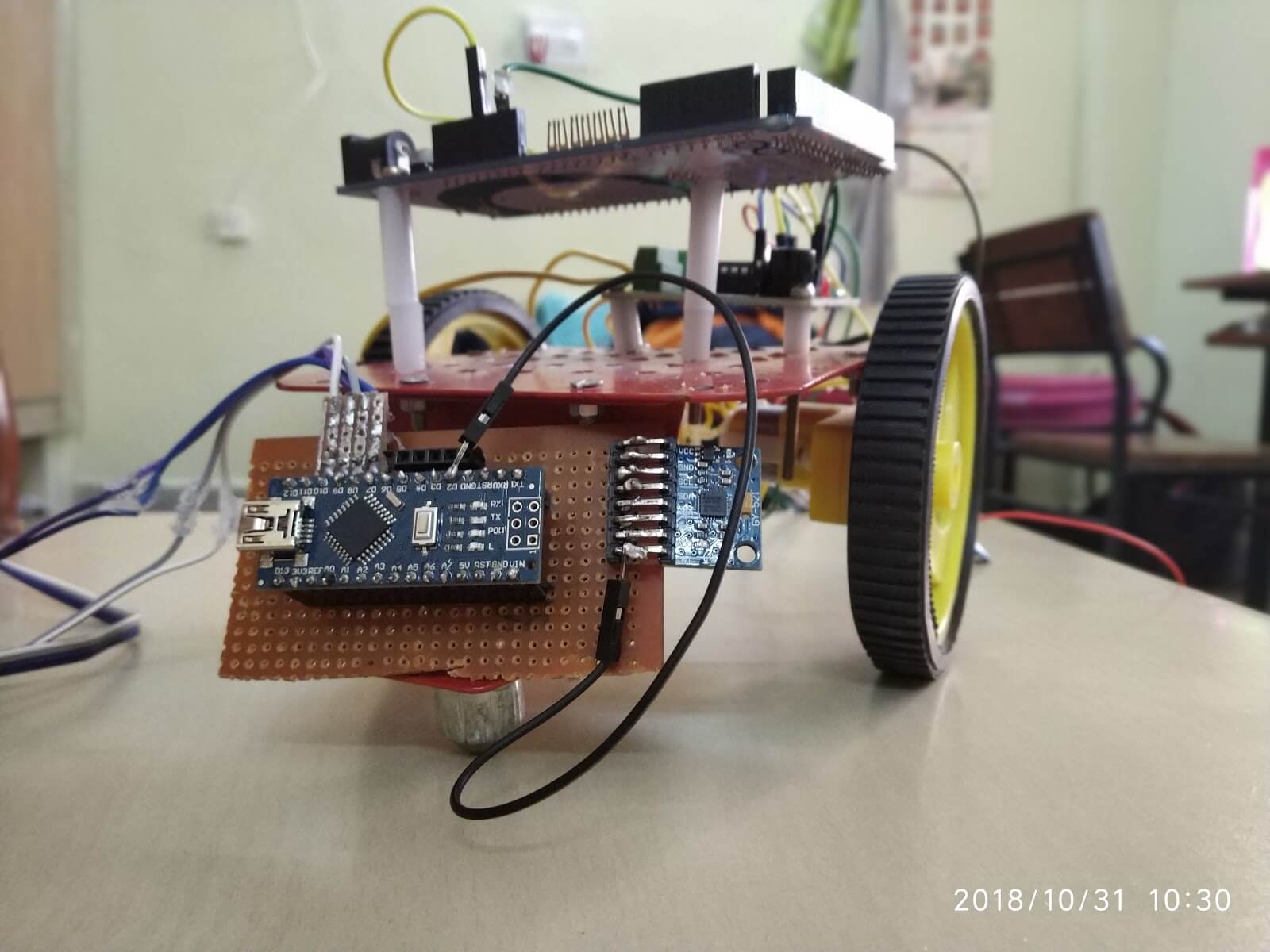
Our aim is to design a prototype which will moves as we change our hand gesture and adjust it's speed according to yaw, pitch and roll readings of the IMU sensors.
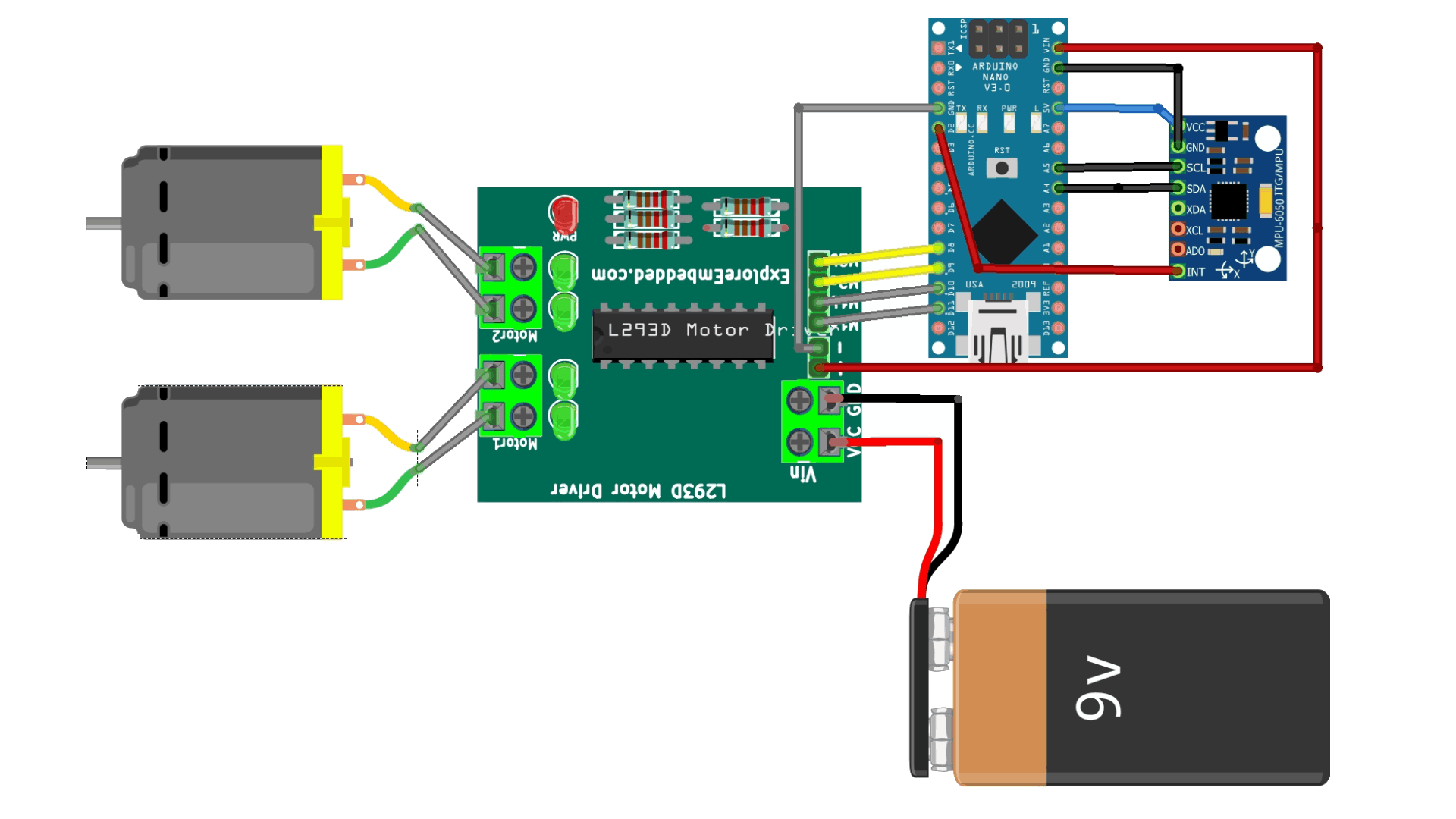
Circuit Diagram
It works on the concept of H-bridge. H-bridge is a circuit which allows the voltage to be flown in either direction.
The hand gesture controlled bot is a bot which receives it commands by giving pitch and roll to hand. This is helpful for people on wheelchair who can't even move their fingers or hands.These bots are very useful in many applications like remote surveillance, military etc. Hand gesture controlled robot can be used by physically challenged people for wheelchair control .Hand gesture controlled industrial grade robotic arms can be developed.